
I am an Associate Professor at the School of Artificial Intelligence, Beijing Normal University.
Prior to this, I served as a Boya Postdoc at Peking University, working with Prof. Song-Chun Zhu. I received my PhD in Computer Science from the School of EECS at Peking University, where I was advised by Prof. Yizhou Wang, and I obtained my bachelor’s degree in Communication Engineering from Beijing Jiaotong University.
My research interests are embodied AI and multi-agent system, particularly in building cognition-inspired agents with physical and social common sense.
🔥 News
- 2026.06: 🎉🎉 Honored to be selected for the 2026 Beijing Science and Technology Rising Star Program.
- 2026.05: 🎉🎉 One paper about educational social dynamics simulation was accepted by ICML 2026, congratulations to Jingzhe, Hengbin and Yongdan.
- 2026.04: 🎉🎉 One paper about cross-embodiment active visual tracking was accepted by IEEE RA-L, congratulations to Kui.
- 2026.04: 🎉🎉 Four papers were accepted by ACL 2026 (3 Main + 1 Findings), with 2 selected as Oral presentations.
- 2025.12: 🎉🎉 One paper about value-driven agents was accepted by AAMAS 2026 (Oral), congratulations to Jingzhe.
- 2025.11: 🎉🎉 Two papers were accepted by NeurIPS 2025 Workshops, congratulations to Shuhang and Hengbin.
- 2025.10: Server as an Area Chair for ICML 2026 and Co-Session Chair for IROS 2025.
- 2025.09: Serve as an Area Chair for AISTATS 2026.
- 2025.09: 🎉🎉 Honored to receive the ACM SIGAI China Rising Star Award.
- 2025.09: Tutorial on “Multi-agent Interaction”, RLChina@Tsinghua University.
- 2025.09: 🎉🎉 One paper about reinforced token prediction was accepted by NeurIPS 2025, congratulations to Long Ma.
- 2025.08: Serve as an Area Chair for ICLR 2026.
- 2025.08 🎉🎉 One paper was accepted by CoRL 2025.
- 2025.07 🏆 CoMet received the ACL 2025 SAC Highlight Award.
- 2025.06 🎉🎉 UnrealZoo was accepted by ICCV 2025, CoMet was selected for an oral presentation at ACL.
- 2025.06 🎉🎉 One paper about self-improving VLM was accepted by IROS 2025, congratulations to Kui.
- 2025.05 🎉🎉 Two papers were accepted by ACL’25 (1 main and 1 findings), congratulations to Shuhang and Yipeng.
- 2025.05 🎉🎉 One paper about offline in-context RL was accepted by ICML’25, congratulations to Long Ma.
- 2025.03: Serve as the Chair of the Challenge Committee at ATEC 2025 Competition.
- 2025.01 🎉🎉 One paper about autonomous agents was accepted by ICLR’25.
- 2024.12: We released UnrealZoo, a collection of virtual worlds integrated UnrealCV for embodied AI.
- 2024.12: Serve as an Area Chair for ICML 2025.
- 2024.11: Talk at PKU Workshop on Cognitive Reasoning 2024 in Beijing.
- 2024.10: Tutorial on “Multi-agent reinforcement learning”, RLChina@HKUST(Guanzhou), Video.
📝 Preprints
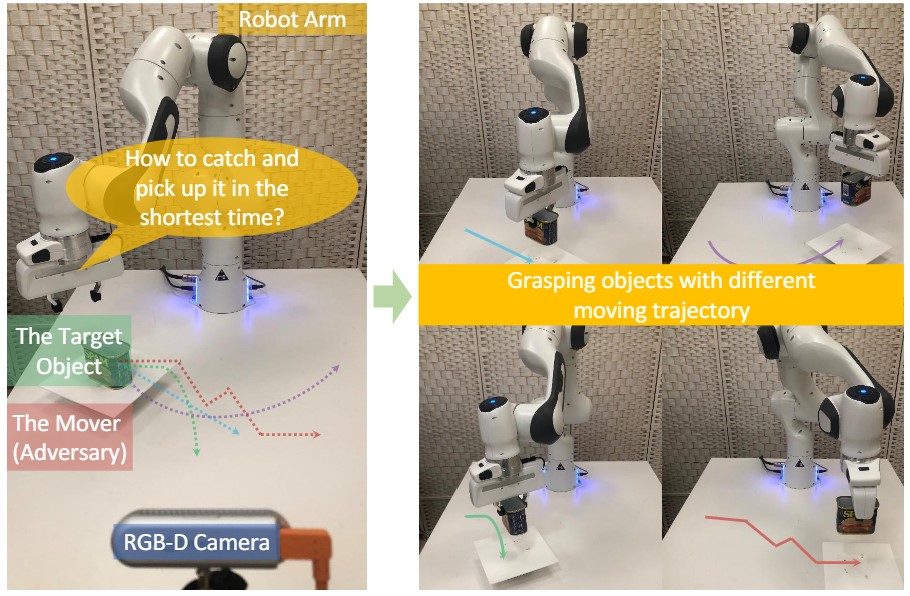
Grasparl: Dynamic Grasping via Adversarial Reinforcement Learning
Tianhao Wu*, Fangwei Zhong*, Yiran Geng, Hongchen Wang, Yongjian Zhu, Yizhou Wang, Hao Dong
ArXiv preprint, 2022
- Learning to grasp moving objects with vision observation via adversarial RL.
📝 Publications
* : co-first author, ✉ : corresponding author
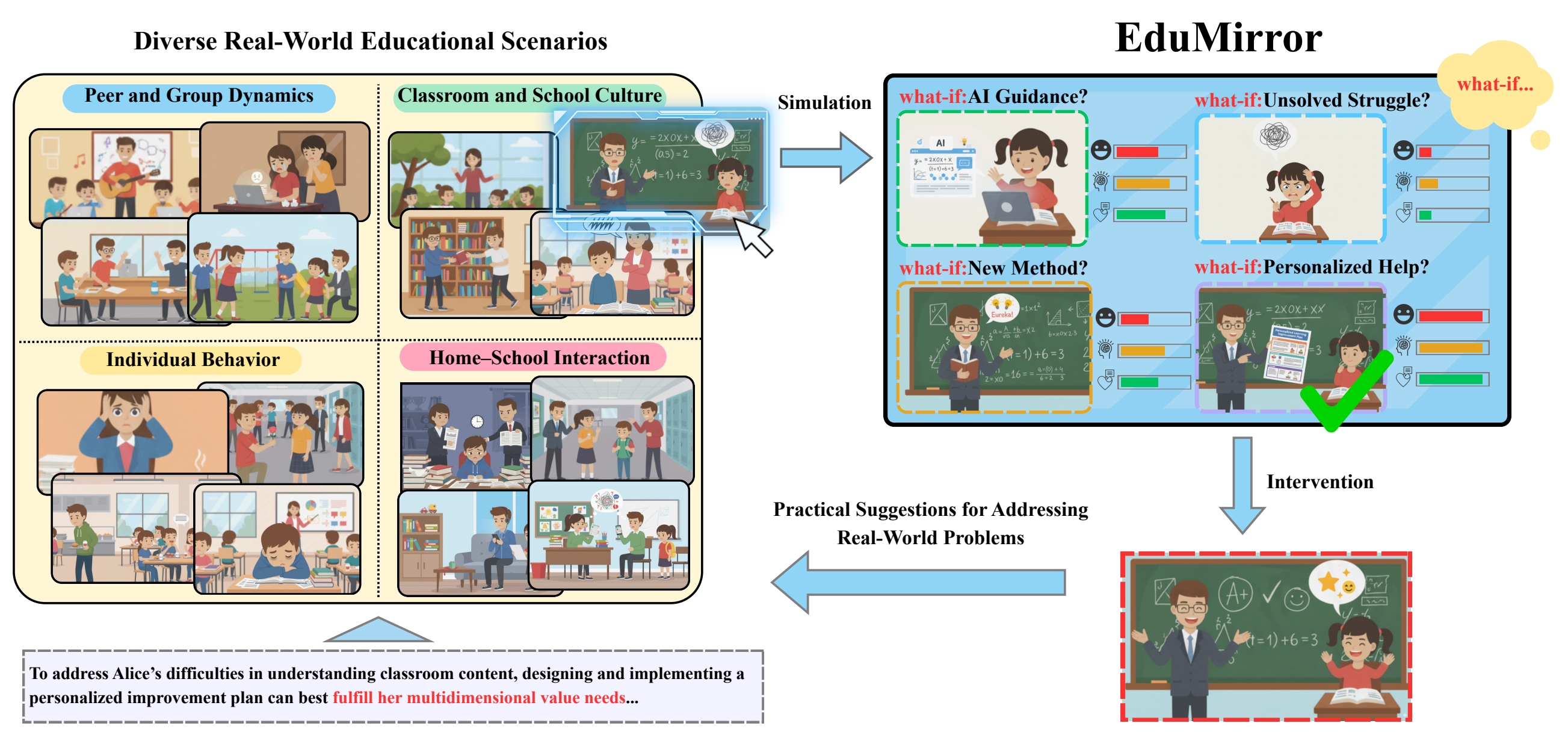
EduMirror: Modeling Educational Social Dynamics with Value-driven Multi-agent Simulation
Jingzhe Lin*, Hengbin Yu*, Yongdan Zeng*, Fangwei Zhong✉
International Conference on Machine Learning (ICML), 2026
- A multi-agent simulator for educational social dynamics with value-driven agents grounded in social value and intrinsic motivation.
AdaTracker: Learning Adaptive In-Context Policy for Cross-Embodiment Active Visual Tracking
Kui Wu, Hao Chen, Jinzhu Han, Haijun Liu, Churan Wang, Yizhou Wang, Zhoujun Li, Si Liu, Fangwei Zhong✉
IEEE Robotics and Automation Letters (RA-L), 2026
- An adaptive in-context policy for cross-embodiment active visual tracking, enabling zero-shot generalization via an Embodiment Context Encoder.
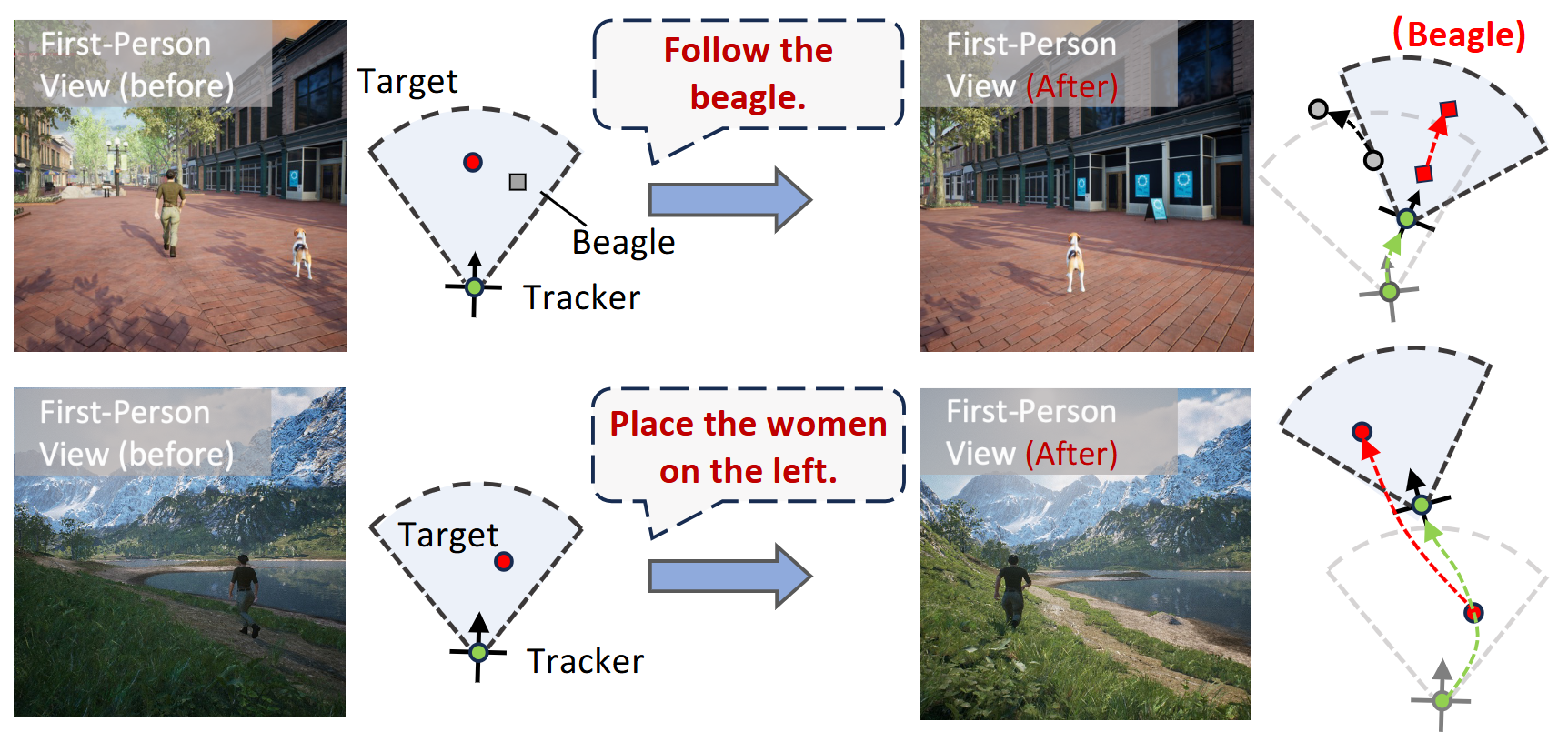
Hierarchical Instruction-aware Embodied Visual Tracking
Kui Wu, Hao Chen, Churan Wang, Fakhri Karray, Zhoujun Li, Yizhou Wang, Fangwei Zhong✉
Frontiers of Computer Science (FCS), 2026
- A hierarchical framework that combines LLM-based semantic-spatial goal aligner and RL-based adaptive goal-aligned policy for user-centric embodied visual tracking.
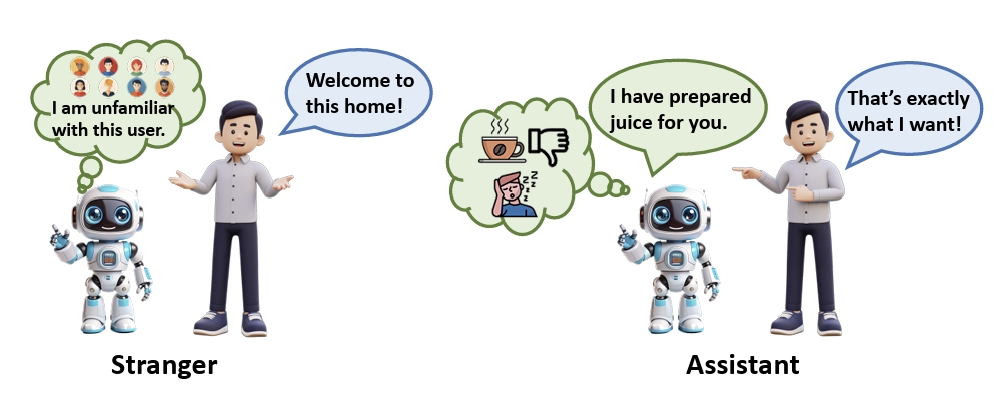
Communication-Efficient Desire Alignment for Proactive Embodied Human–Agent Interaction
Yuanfei Wang, Xinju Huang, Fangwei Zhong✉, Yaodong Yang, Yizhou Wang, Yuanpei Chen✉, Hao Dong✉
Annual Meeting of the Association for Computational Linguistics (ACL), 2026 (Main, Oral)
- A novel FAMER framework for fast desire alignment with mental reasoning and reflection-based communication in embodied agent-human interaction.

An LLM-based Agent Simulation Approach to the Study of Moral Evolution
Ziheng Zhou, Huacong Tang, Mingjie Bi, Yipeng Kang, Wanying He, Fang Sun, Yizhou Sun, Ying Nian Wu, Demetri Terzopoulos, Fangwei Zhong✉
Annual Meeting of the Association for Computational Linguistics (ACL), 2026 (Main, Oral)
- An LLM-based agent simulation framework modeling prehistoric hunter-gatherer societies to study moral evolution.
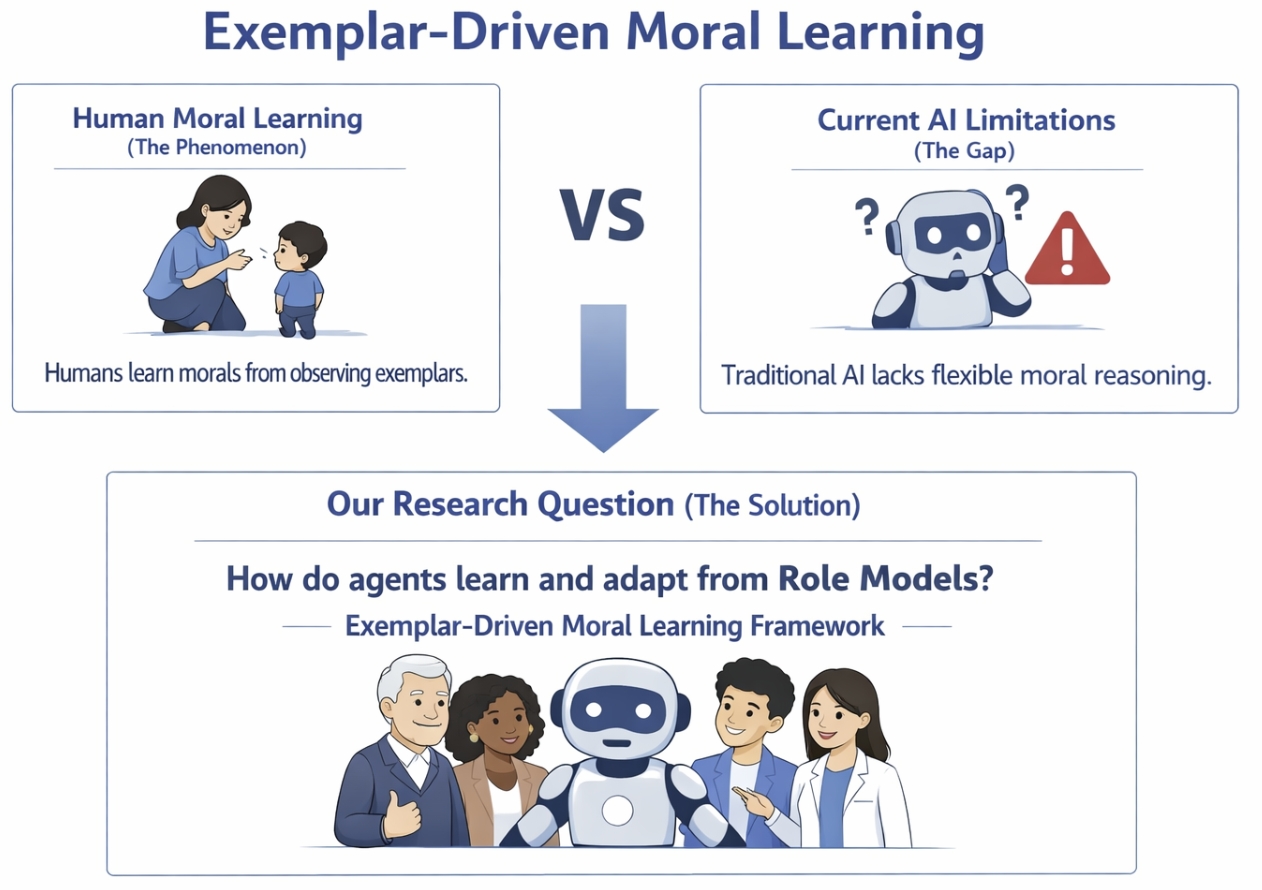
How do Role Models Shape Collective Morality? Exemplar-Driven Moral Learning in Multi-Agent Simulation
Junjie Liao, Huacong Tang, Ziheng Zhou, Yizhou Wang, Fangwei Zhong✉
Annual Meeting of the Association for Computational Linguistics (ACL), 2026 (Main)
- A multi-agent simulation exploring how role models shape collective morality through exemplar-driven learning.
Simple Role Assignment is Extraordinarily Effective for Safety Alignment
Ziheng Zhou, Jiakun Ding, Zhaowei Zhang, Ruosen Gao, Yingnian Wu, Demetri Terzopoulos, Yipeng Kang, Fangwei Zhong, Junqi Wang
Annual Meeting of the Association for Computational Linguistics (ACL), 2026 (Findings)
- A training-free role assignment pipeline grounded in Theory of Mind for safety alignment.
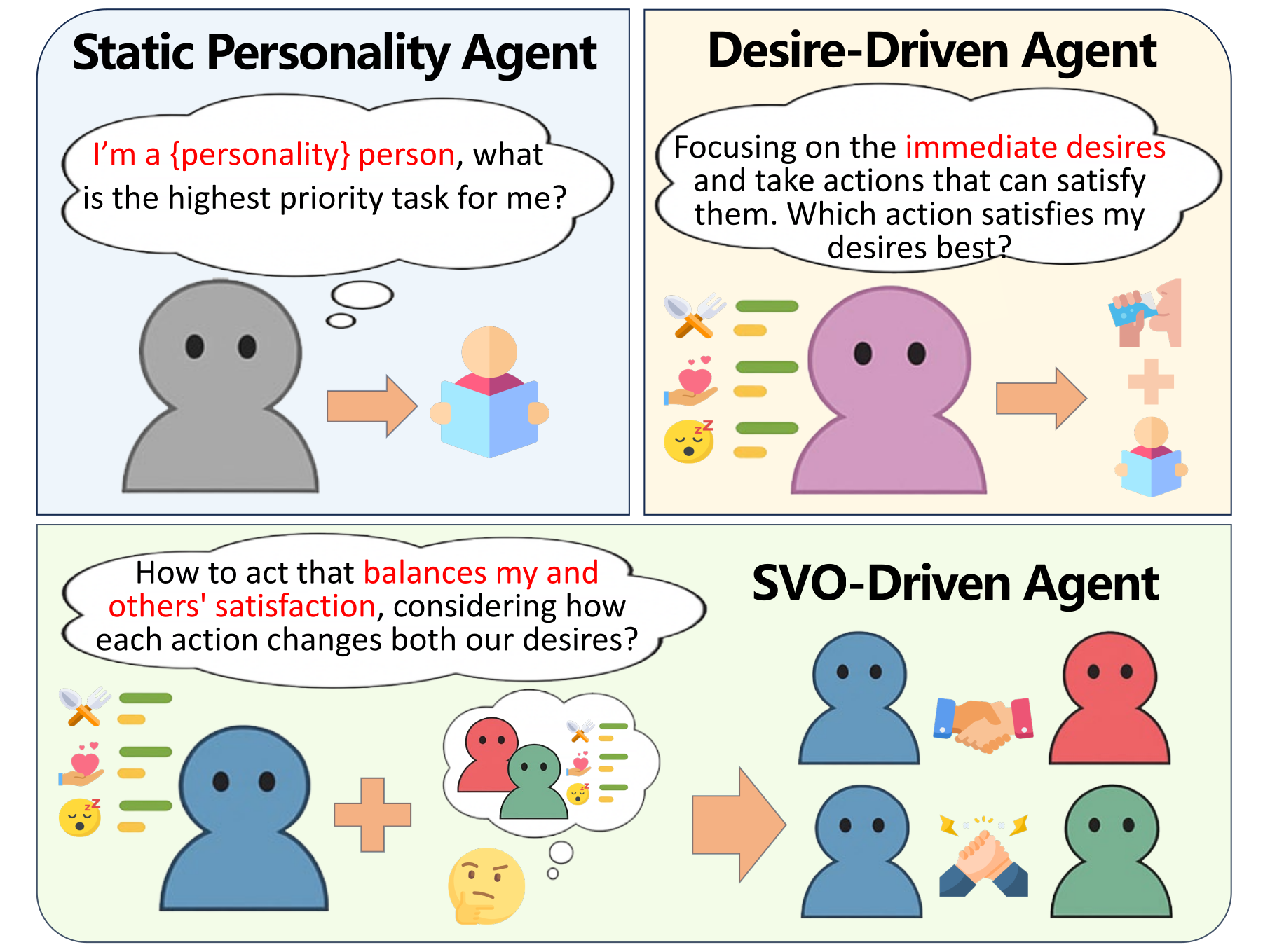
Beyond Self-Interest: Modeling Social-Oriented Motivation for Human-like Multi-Agent Interactions
Jingzhe Lin, Ceyao Zhang, Yaodong Yang, Yizhou Wang, Song-Chun Zhu, Fangwei Zhong✉
International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2026 (Oral)
- A LLM-based agent framework integrating desire-driven autonomy with Social Value Orientation (SVO) theory for simulating human-like social interactions.
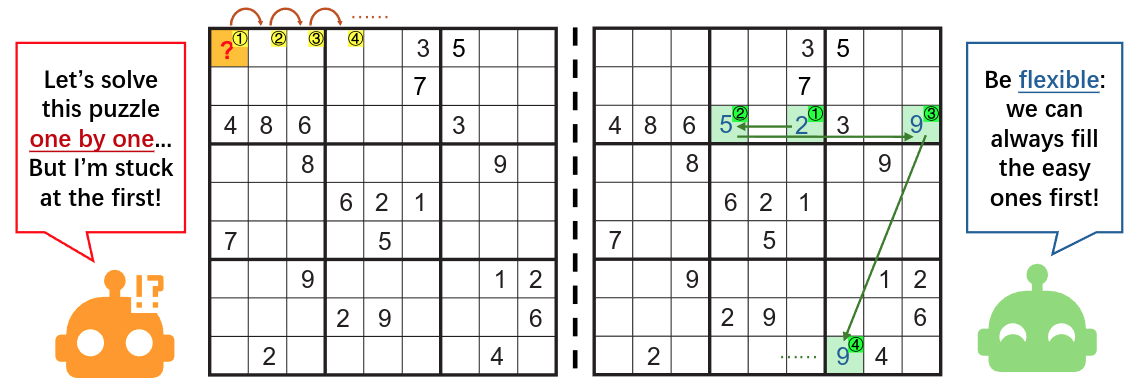
Reinforced Context Order Recovery for Adaptive Reasoning and Planning
Long Ma, Fangwei Zhong✉, Yizhou Wang
Advances in Neural Information Processing Systems (NeurIPS), 2025
- A novel self-supervised training paradigm to overcome the order dependence in the next-token prediction paradigm via reinforcement learning.
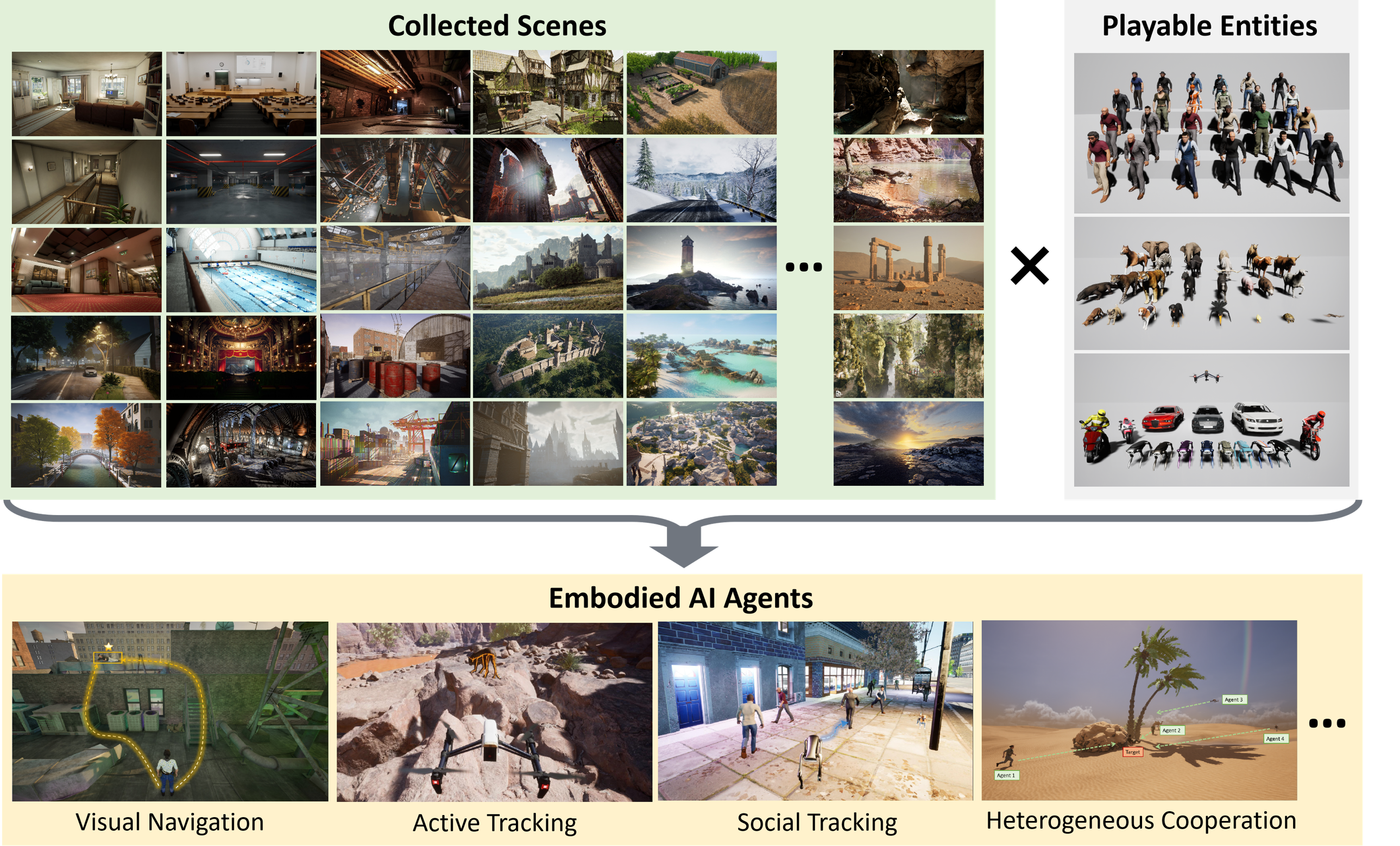
UnrealZoo: Enriching Photo-realistic Virtual Worlds for Embodied AI
Fangwei Zhong* ✉, Kui Wu*, Churan Wang, Hao Chen, Hai Ci, Zhoujun Li, Yizhou Wang
International Conference on Computer Vision (ICCV), 2025 (Highlight)

- A rich collection of photo-realistic 3D virtual worlds built on Unreal Engine, designed to reflect the complexity and variability of the open worlds.
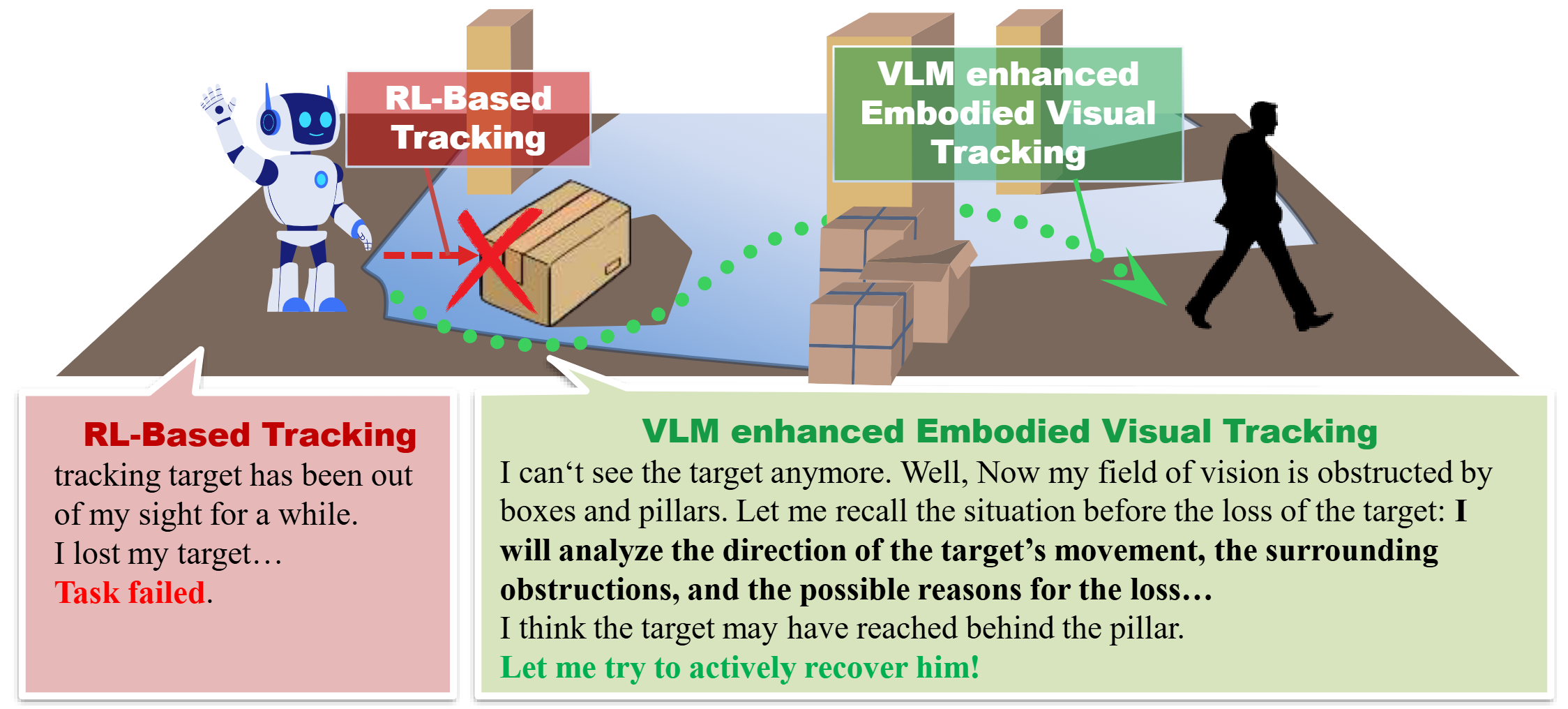
VLM Can Be a Good Assistant: Enhancing Embodied Visual Tracking with Self-Improving Vision-Language Models
Kui Wu, Shuhang Xu, Hao Chen, Churan Wang, Zhoujun Li, Yizhou Wang, Fangwei Zhong✉
The 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
- A self-improving framework that enhances Embodied Visual Tracking (EVT) with Vision-Language Models (VLMs) to recover tracking from failure.
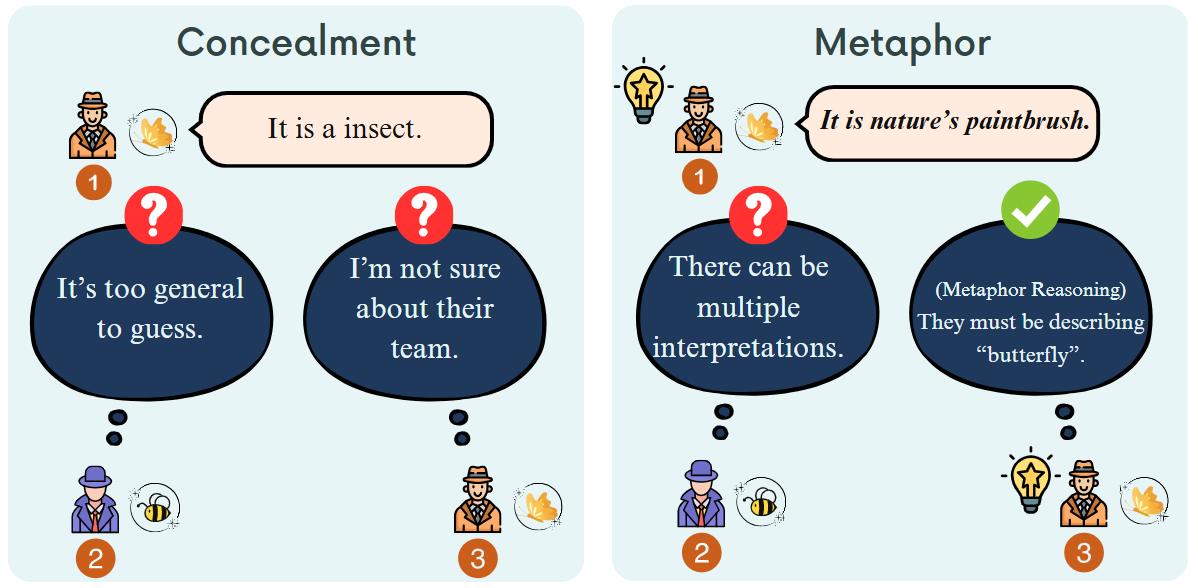
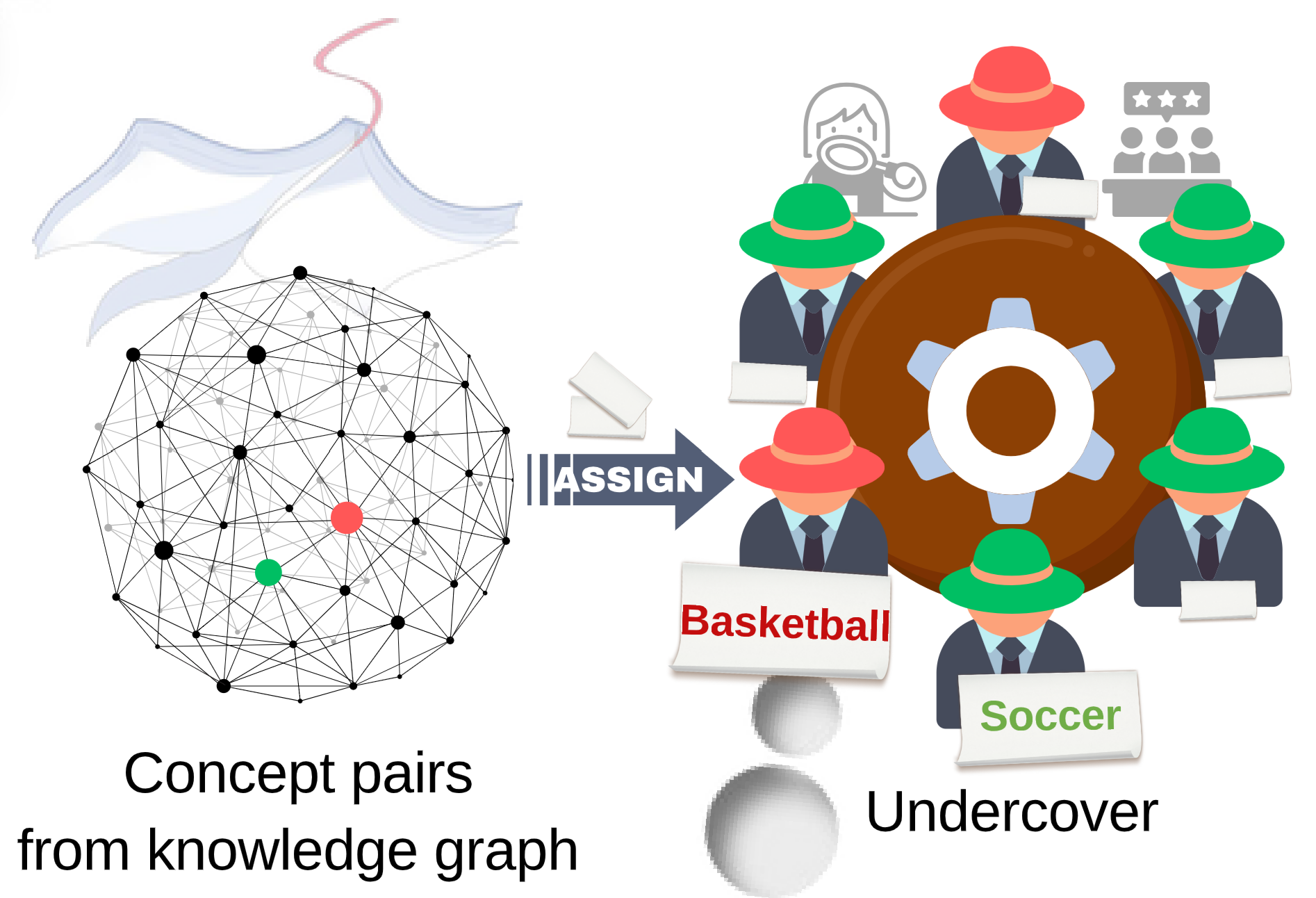
CoMet: Metaphor-Driven Covert Communication for Multi-Agent Language Games
Shuhang Xu, Fangwei Zhong✉
The 63rd Annual Meeting of the Association for Computational Linguistics (ACL), 2025 (Oral, SAC Highlight Award)
- A self-improving reasoning framework that enables LLM-based agents to engage in metaphor processing on Undercover and Adversarial Taboo.
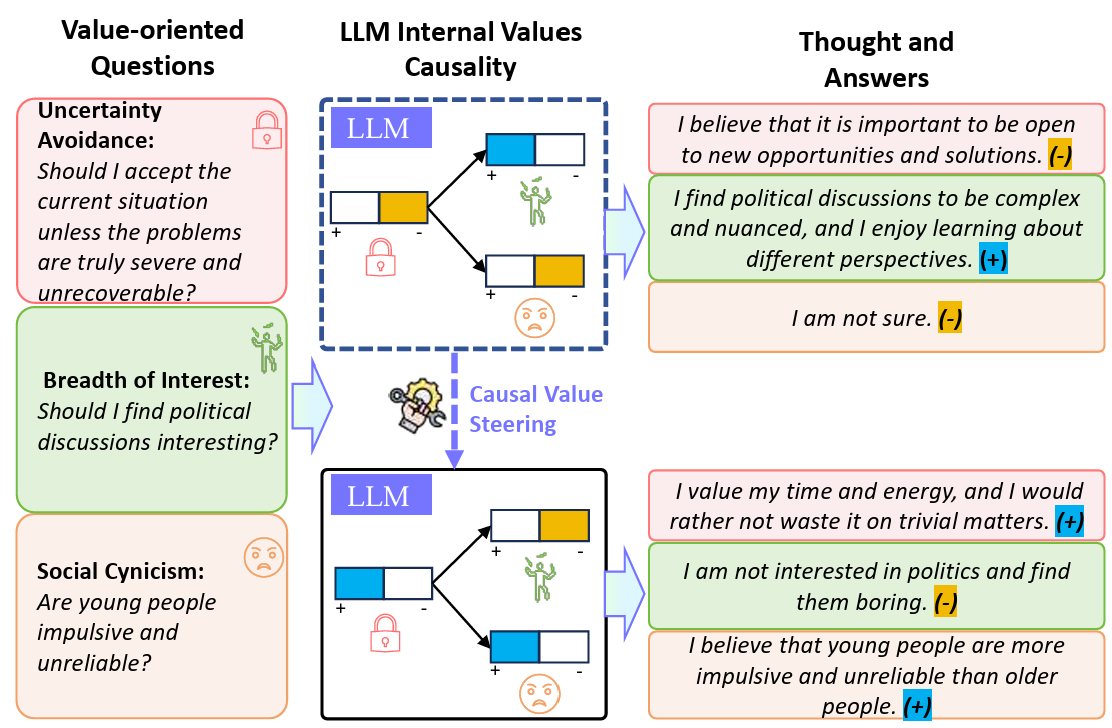
Are the Values of LLMs Structurally Aligned with Humans? A Causal Perspective
Yipeng Kang, Junqi Wang, Yexin Li, Mengmeng Wang, Wenming Tu, Quansen Wang, Hengli Li, Tingjun Wu, Xue Feng, Fangwei Zhong, Zilong Zheng✉
The 63rd Annual Meeting of the Association for Computational Linguistics (ACL), 2025 (Findings)
- Discovering the latent causal structure of the values in LLMs.
Behavior-agnostic Task Inference for Robust Offline In-context Reinforcement Learning
Long Ma, Fangwei Zhong✉, Yizhou Wang
International Conference on Machine Learning (ICML), 2025
- A model-based task inference method that is robust to the changes of in-context behavior for offline RL.
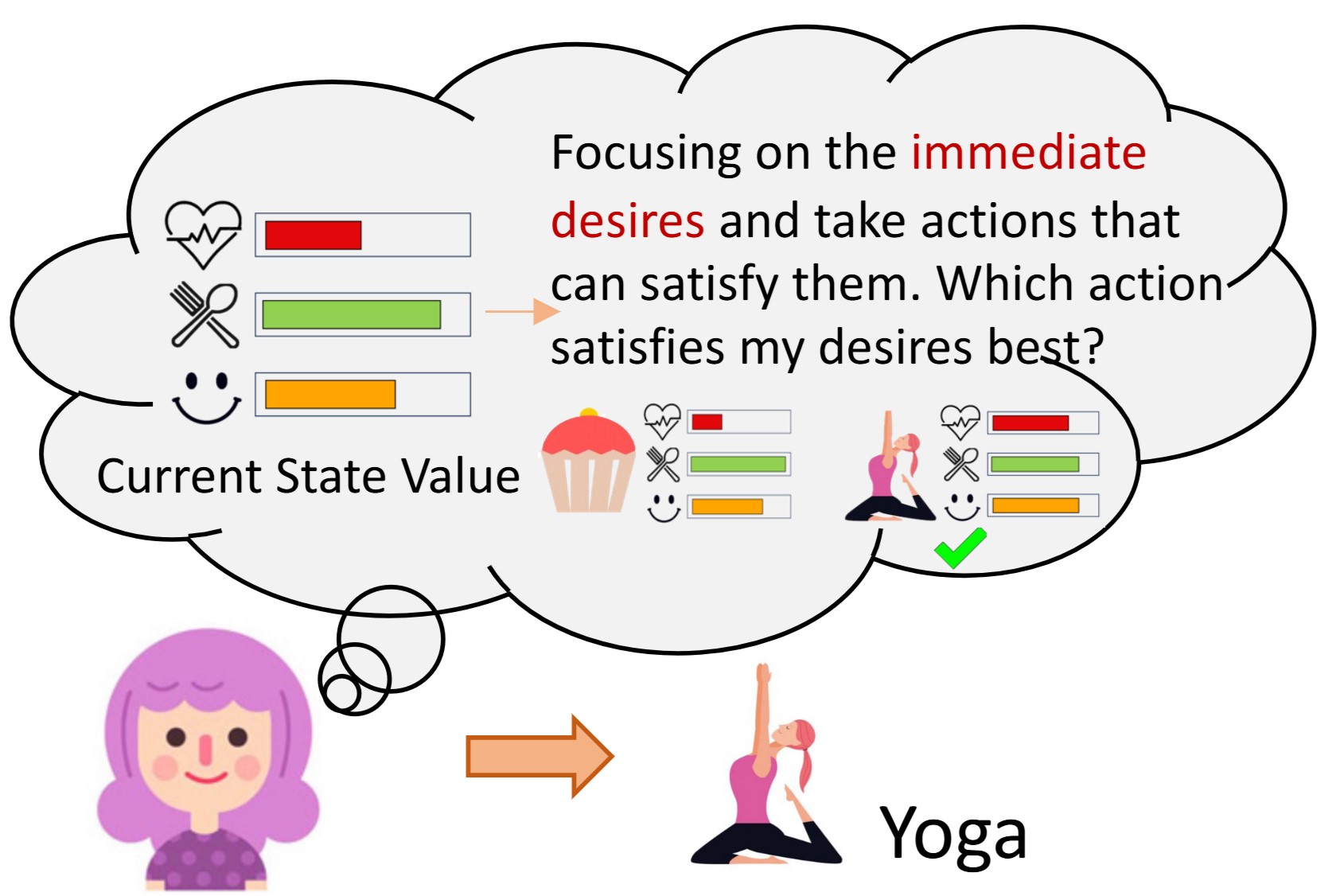
Simulating Human-like Daily Activities with Desire-driven Autonomy
Yiding Wang*, Yuxuan Chen*, Fangwei Zhong✉, Long Ma, Yizhou Wang
International Conference on Learning Representations (ICLR), 2025
- A desire-driven autonomy framework to guide LLM-based agents to simulate human-like daily activities in text-based environments.
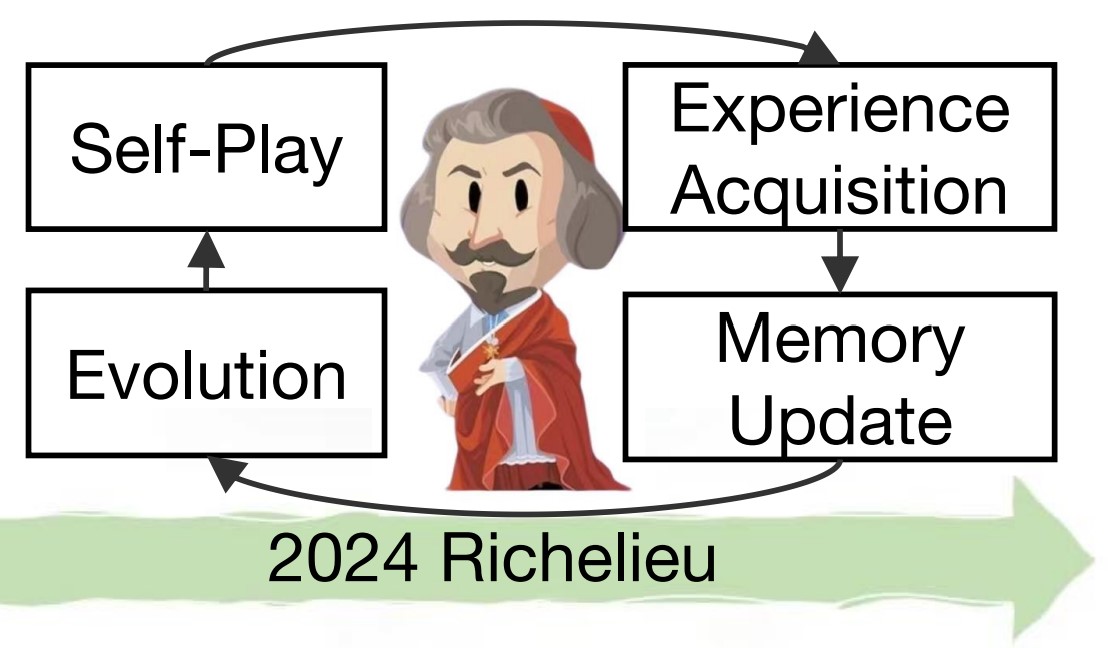
Richelieu: Self-Evolving LLM-Based Agents for AI Diplomacy
Zhenyu Guan, Xiangyu Kong✉, Fangwei Zhong✉, Yizhou Wang
Advances in Neural Information Processing Systems (NeurIPS), 2024
- A LLM-based social agent that can solve the game of AI Diplomacy only by self-play, without fine-tuning or regularizing on human data.
Fine-Tuning Out-of-Vocabulary Item Recommendation with User Sequence Imagination
Ruochen Liu, Hao Chen, Yuanchen Bei, Qijie Shen, Fangwei Zhong, Senzhang Wang, Jianxin Wang
Advances in Neural Information Processing Systems (NeurIPS), 2024 (Spotlight)
- A novel User Sequence IMagination (USIM) fine-tuning framework that first imagines the user sequences and then refines the generated OOV embeddings with the user behavioral embeddings.
Empowering Embodied Visual Tracking with Visual Foundation Models and Offline RL
Fangwei Zhong*, Kui Wu*, Hai Ci, Churan Wang, Hao Chen
The 18th European Conference on Computer Vision (ECCV), 2024
- Significantly improved the training efficiency and generalization of embodied visual tracking with visual foundation models and offline RL.
Fast Peer Adaptation with Context-aware Exploration
Long Ma*, Yuanfei Wang*, Fangwei Zhong✉, Song-Chun Zhu, Yizhou Wang
International Conference on Machine Learning (ICML), 2024
- Learn a context-aware policy with a peer identification reward to effectively explore and quickly adapt to unknown peers.
Bi-dexhands: Towards Human-level Bimanual Dexterous Manipulation
Yuanpei Chen, Yiran Geng, Fangwei Zhong, Jiaming Ji, Jiechuang Jiang, Zongqing Lu, Hao Dong, Yaodong Yang
IEEE Transactions on Pattern Analysis and Machine Intelligence (IEEE T-PAMI), 2023

- A collection of bimanual dexterous manipulations tasks and reinforcement learning algorithms.
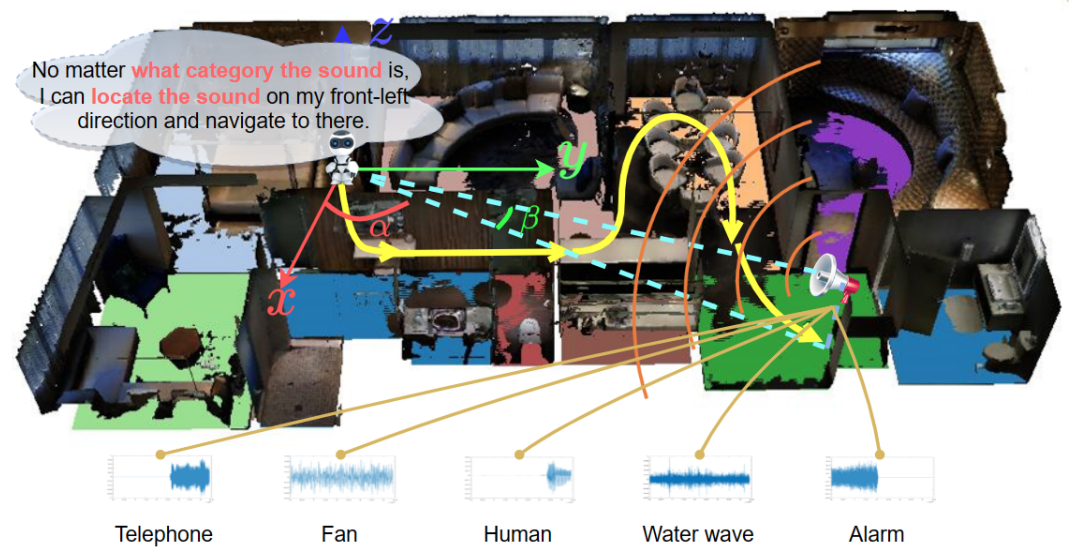
Learning Semantic-Agnostic and Spatial-Aware Representation for Generalizable Visual-Audio Navigation
Hongcheng Wang*, Yuxuan Wang*, Fangwei Zhong, Mingdong Wu, Yizhou Wang, Jianwei Zhang, Hao Dong
IEEE Robotics and Automation Letters (RA-L), 2023
- A brain-inspired plug-and-play method to learn a semantic-agnostic and spatial-aware representation for generalizable visual-audio navigation.
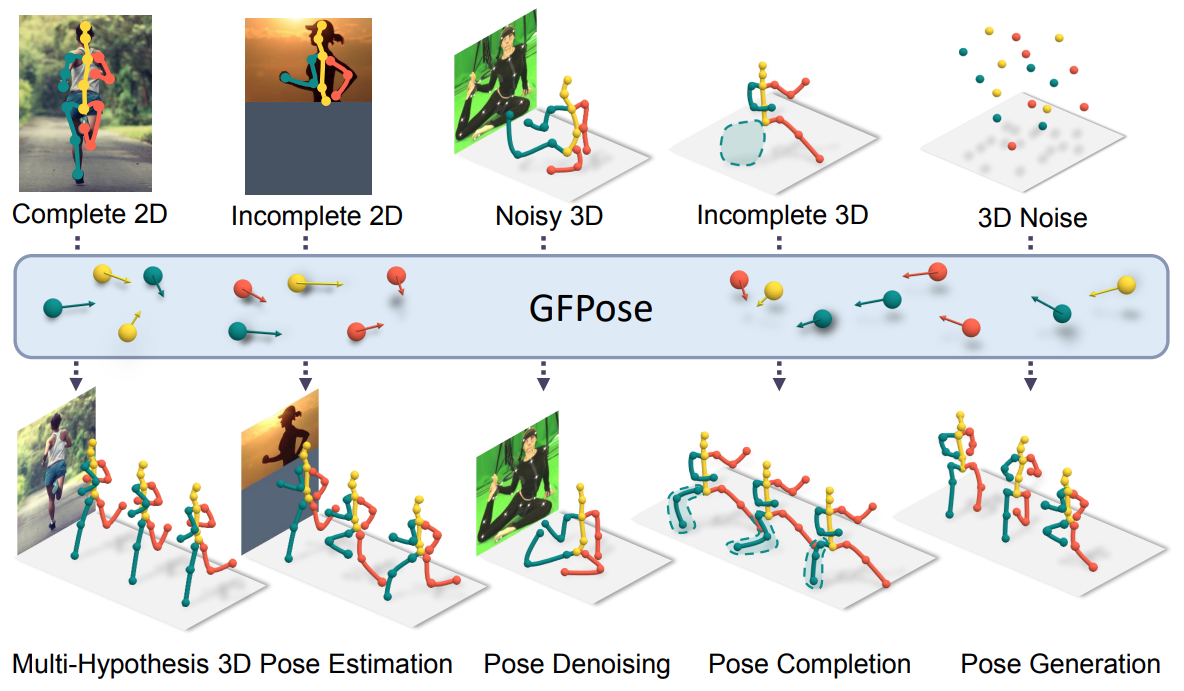
GFPose: Learning 3D Human Pose Prior with Gradient Fields
Hai Ci, Mingdong Wu, Wentao Zhu, Xiaoxuan Ma, Hao Dong, Fangwei Zhong✉, Yizhou Wang
Proc. of the IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2023

- A versatile framework to model plausible 3D human poses in gradient fields for various applications.

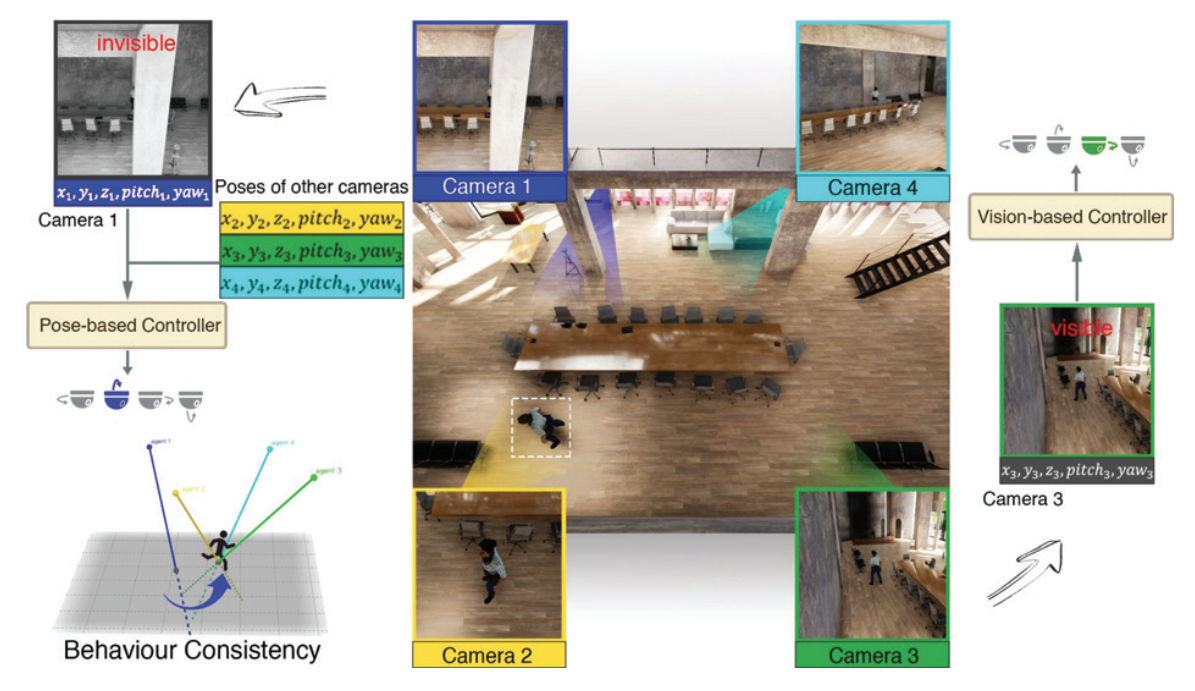
Proactive Multi-Camera Collaboration for 3D Human Pose Estimation
Hai Ci*, Mickel Liu*, Xuehai Pan*, Fangwei Zhong✉, Yizhou Wang
International Conference on Learning Representations (ICLR), 2023
- A novel MARL framework to solve proactive multi-camrea collaborations for 3D HPE in human crowds.

RSPT: Reconstruct Surroundings and Predict Trajectories for Generalizable Active Object Tracking
Fangwei Zhong*, Xiao Bi*, Yudi Zhang, Wei Zhang, Yizhou Wang
Thirty-Seventh AAAI Conference on Artificial Intelligence (AAAI), 2023 (Oral)
- A framework to form a structure-aware motion representation by Reconstructing Surroundings and Predicting the target Trajectory.
TarGF: Learning Target Gradient Field to Rearrange Objects without Explicit Goal Specification
Mingdong Wu*, Fangwei Zhong*, Yulong Xia, Hao Dong
Advances in Neural Information Processing Systems (NeurIPS), 2022
- A framework based on a target gradient field trained by score-matching to tackle object rearrangement without explicit goal specification.
MATE: Benchmarking Multi-Agent Reinforcement Learning in Distributed Target Coverage Control
Xuehai Pan*, Mickel Liu*, Fangwei Zhong✉, Yaodong Yang✉, Song-Chun Zhu, Yizhou Wang
Thirty-sixth Conference on Neural Information Processing Systems Datasets and Benchmarks Track (NeurIPS D&B), 2022

- A gamification of the multi-camera multi-target target coverage problem, and an all-in-one multi-agent reinforcement learning benchmark
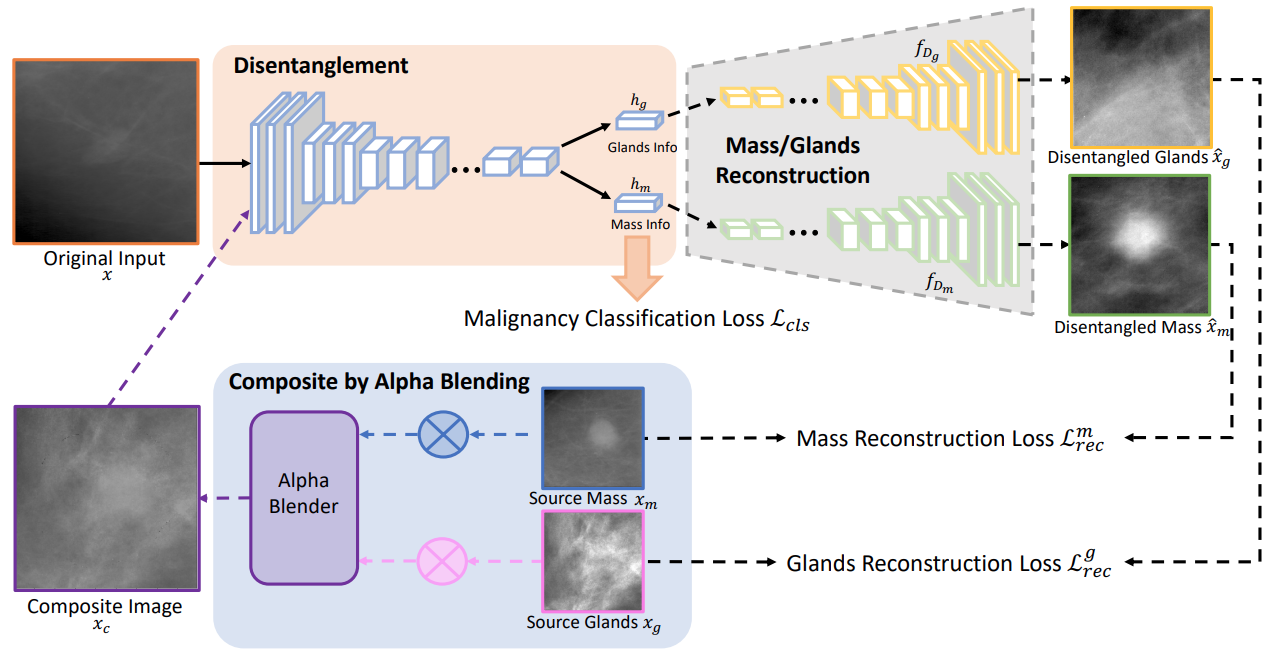
Disentangling Disease-related Representation from Obscure for Disease Prediction
Chu-Ran Wang, Fei Gao, Fandong Zhang, Fangwei Zhong✉, Yizhou Yu, Yizhou Wang
International Conference on Machine Learning (ICML), 2022
- A disentanglement learning strategy under the guidance of alpha blending generation in an encoder-decoder framework (DAB-Net).
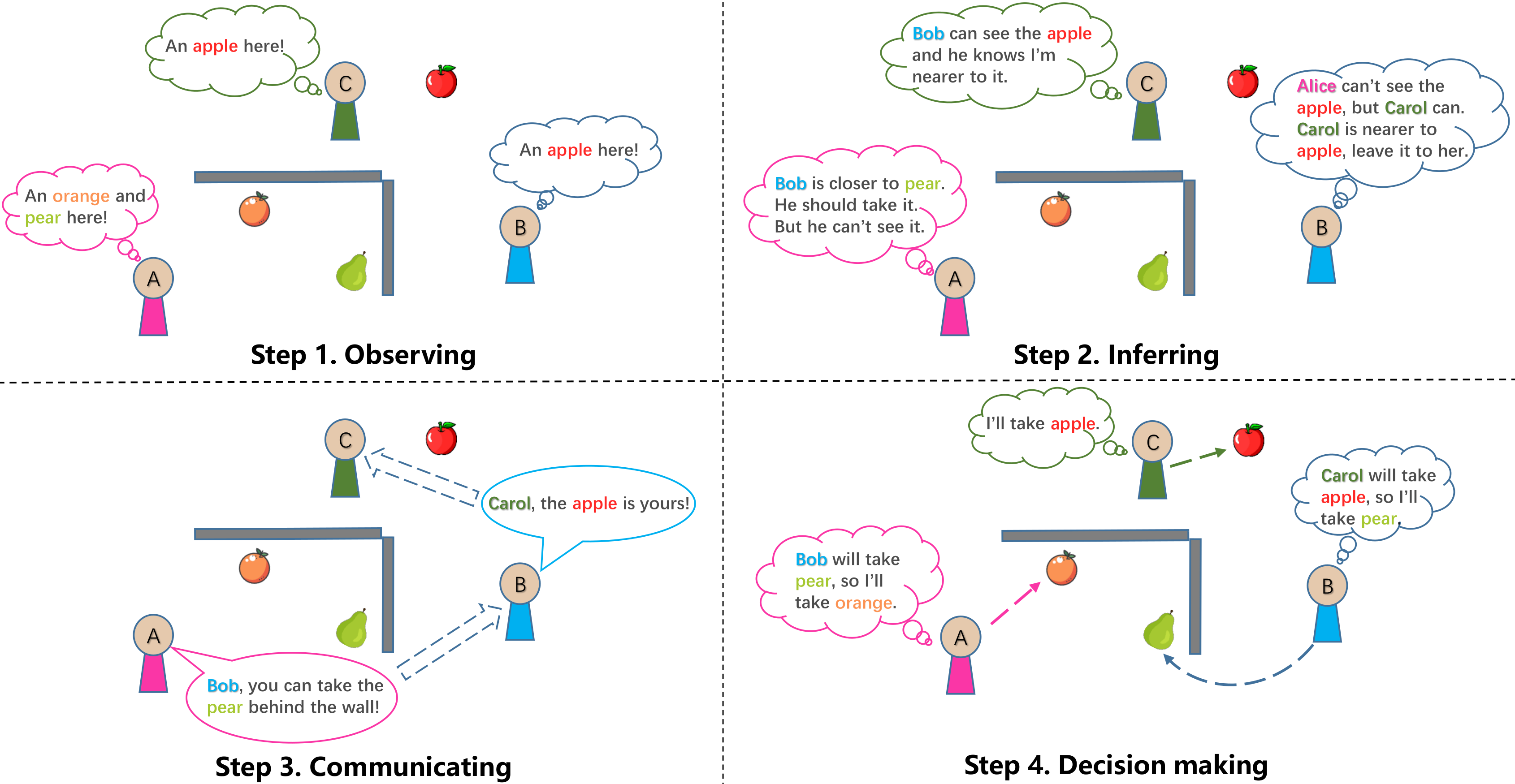
ToM2C: Target-oriented Multi-agent Communication and Cooperation with Theory of Mind
Yuanfei Wang*, Fangwei Zhong*, Jing Xu, Yizhou Wang
International Conference on Learning Representations (ICLR), 2022

- A Target-oriented Multi-agent Communication and Cooperation mechanism using Theory of Mind.
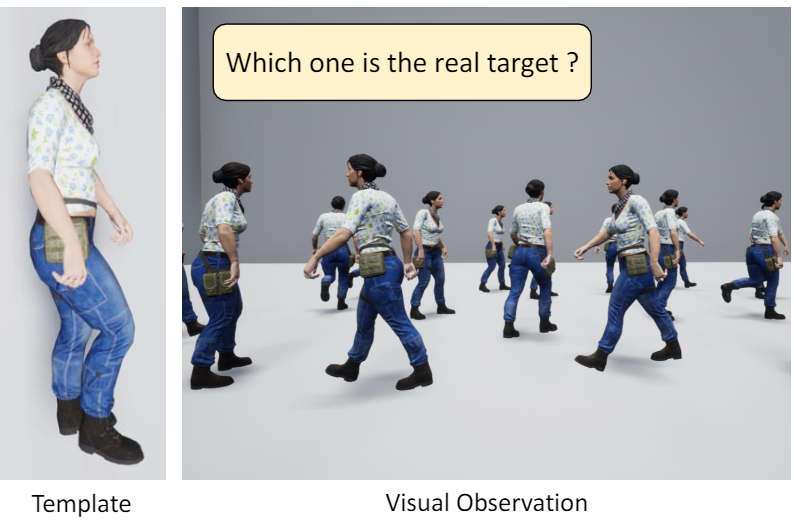
Towards Distraction-Robust Active Visual Tracking
Fangwei Zhong, Peng Sun, Wenhan Luo, Tingyun Yan, Yizhou Wang
International Conference on Machine Learning (ICML), 2021
Project,
Paper,
Code ,
Environment
- A mixed cooperative-competitive multi-agent game: a target and multiple distractors form a collaborative team to play against a tracker.
- A bunch of practical methods: a reward function for distractors, a cross-modal teacher-student learning strategy, and a recurrent attention module for the tracker.
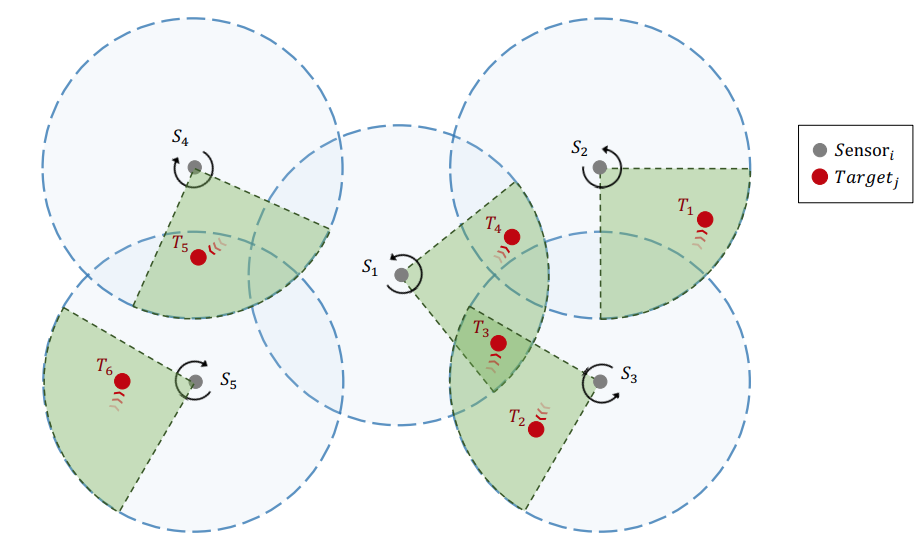
Learning Multi-Agent Coordination for Enhancing Target Coverage in Directional Sensor Networks
Jing Xu*, Fangwei Zhong*, Yizhou Wang
Thirty-fourth Conference on Neural Information Processing Systems (NeurIPS), 2021

- a Hierarchical Target-oriented Multi-Agent Coordination (HiT-MAC), which decomposes the target coverage problem into two-level tasks: targets assignment by a coordinator and tracking assigned targets by executors.
Pose-Assisted Multi-Camera Collaboration for Active Object Tracking
Jing Li*, Jing Xu*, Fangwei Zhong*, Xiangyu Kong, Yu Qiao, Yizhou Wang
Thirty-Fourth AAAI Conference on Artificial Intelligence (AAAI), 2020
Project,
Paper,
Code 

- An efficient yet effective multi-camera collaboration system for collaborative multiCamera active object tracking.
AD-VAT+: An Asymmetric Dueling Mechanism for Learning and Understanding Visual Active Tracking
Fangwei Zhong, Peng Sun, Wenhan Luo, Tingyun Yan, Yizhou Wang
IEEE Transactions on Pattern Analysis and Machine Intelligence (IEEE TPAMI), 2021
Paper,
Code ,
Environment
- Employ more advanced environment augmentation technique and two-stage training strategies to improve the performance of the tracker in the case of challenging scenarios such as obstacles.
- Analyze the target’s behaviors as the training proceeds and visualize the latent space of the tracker for a better understanding.
AD-VAT: An Asymmetric Dueling mechanism for learning Visual Active Tracking
Fangwei Zhong, Peng Sun, Wenhan Luo, Tingyun Yan, Yizhou Wang
International Conference on Learning Representations (ICLR), 2019
Paper,
Code ,
Environment
- A novel adversarial RL method which adopts an Asymmetric Dueling mechanism (tracker vs. target) for robust active visual tracking
CRAVES: Controlling Robotic Arm with a Vision-based, Economic System
Yiming Zuo*, Weichao Qiu*, Lingxi Xie, Fangwei Zhong, Yizhou Wang, Alan L Yuille
Proc. of the IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2019
Project,
Paper,
Code 

- A vision system for low-cost arm control: trains a vision model in virtual environment, and applies it to real-world images after domain adaptation (a semi-supervised approach).
- One virtual environment for collection data and reinforcement learning.
- Two real-world datasets for evaluation.
End-to-end Active Object Tracking and Its Real-world Deployment via Reinforcement Learning
Wenhan Luo*, Peng Sun*, Fangwei Zhong*, Wei Liu, Tong Zhang, Yizhou Wang
IEEE Transactions on Pattern Analysis and Machine Intelligence (IEEE TPAMI), 2020
Paper, Arxiv,
Code ,
Environment
- Deploy End-to-end active object tracker trained in virtual environment in real-world robot.
End-to-end Active Object Tracking via Reinforcement Learning
Wenhan Luo*, Peng Sun*, Fangwei Zhong, Wei Liu, Tong Zhang, Yizhou Wang
International Conference on Machine Learning (ICML), 2018
Project, Paper, Training code, Gym-tvizdoom, Gym-unrealcv
- An end-to-end active object tracking solution via deep reinforcement learning, where a ConvNet-LSTM function approximator is adopted for the direct frame-to-action prediction.
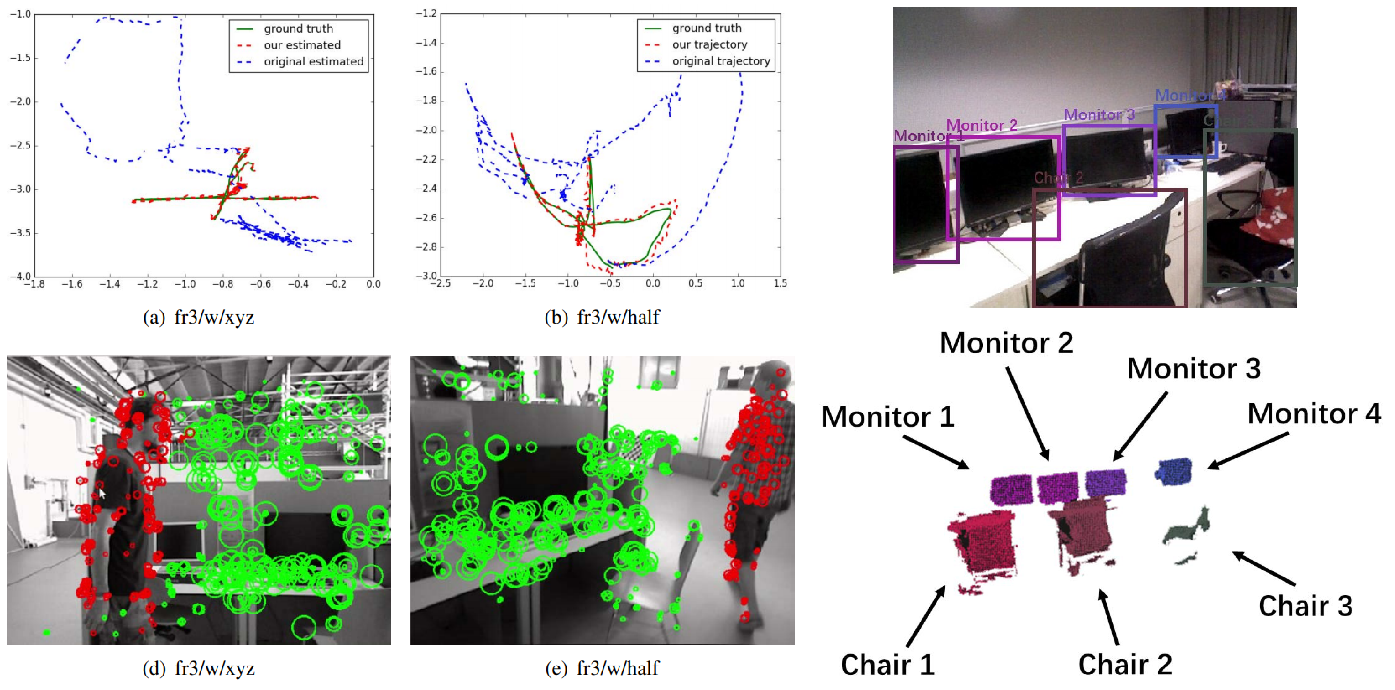
Detect-SLAM: Making Object Detection and SLAM Mutually Beneficial
Fangwei Zhong, Sheng Wang, Ziqi Zhang, Chen Zhou, Yizhou Wang
IEEE Winter Conference on Applications of Computer Vision (WACV), 2018
- A robotic vision system which integrates SLAM with a deep neural network-based object detector to make the two functions mutually beneficial.
Unrealcv: Virtual worlds for computer vision
Weichao Qiu, Fangwei Zhong, Yi Zhang, Siyuan Qiao, Zihao Xiao, Tae Soo Kim, Yizhou Wang, Alan Yuille
ACM Multimedia Open Source Software Competition, 2017

- An open-sourced project to help computer vision researchers build virtual worlds using Unreal Engine 4 (UE4).
UE4). </div> </div>
🎖 Selected Honors and Awards
- 2026.06 Beijing Science and Technology Rising Star Program.
- 2025.09 ACM SIGAI China Rising Star Award.
- 2025.07 ACL 2025 SAC Highlight Award (for CoMet).
- 2023.10 Tencent Rhino-Bird Outstanding Mentor Award.
- 2021.09 ACM China SIGAI Doctoral Dissertation Award.
- 2021.06 China National Postdoctoral Program for Innovative Talents.
- 2021.06 Outstanding Graduate in Peking University and Beijing.
- 2021.05 Top 10 Outstanding Research Award in the School of EECS, Peking University.
- 2016.08 The Second Place in DJI RoboMasters Summer Camp Competition (2/10).
📖 Educations
- 2016.09 - 2021.07, Peking University, Ph.D. in Computer Science.
- 2012.09 - 2016.07, Beijing Jiaotong University, B.S. in Communication Engineering.
💻 Professional Service
- Area Chair / Senior Program Committee (SPC): ICML, ICLR, AISTATS, NeurIPS, AAAI
- Journal Reviewer: Nature Machine Intelligence, The International Journal of Robotics Research, ACM Computing Surveys, IEEE TPAMI, IEEE TMM, IEEE TMC, IEEE TAFFC, IEEE TIP, IEEE TVT, IEEE TIV, IEEE TSMCA, IEEE TCDS, IEEE RA-L, ACM TOMM, Sensors, IEEE Access, RAS
- Conference Reviewer/PC Member: ICML, NeurIPS, ICLR, CVPR, ICCV, ECCV, RSS, ICRA, IROS, ACM MM, ACCV, WACV, AISTATS